Keywords: global time; canonical ordering; causality; distributed reception; astrophysical sources; pulsar timing; index-based temporal order; distributed physical systems.
Preface / Reader’s Guide
This paper proposes a physical theory of time that differs fundamentally from standard treatments. To avoid misreading, the reader is advised to keep the following distinctions in mind. This work does not address spacetime geometry or relativistic dynamics. It concerns only the operational reconstruction of temporal order by observers. In contrast to Lamport clocks, the present framework does not assume that the source-side order of events is known or accessible. Temporal order is constructed solely from reception events at observers.
First, the theory does not begin with spacetime, metrics, or clock models. It begins with observation. Temporal order is taken to be physically accessible only through the registration of events by observers. Any intrinsic order of distant sources, if it exists, is operationally inaccessible and plays no role in the construction of time.
Second, time is treated here not as a coordinate, not as a parameter of equations, and not as the reading of an ideal clock, but as a physically reconstructed ordering relation. A numerical time parameter is introduced only after canonical order has been established, and serves as an operational parametrization, not as a fundamental object.
Finally, the theory makes physical predictions, but of a specific kind. They are not predictions of dynamical evolution, but constraints on the admissible behavior of time itself. In particular, the theory forbids observer-dependent divergence of global time within a shared reconstruction domain and excludes retroactive modification of temporal history.
Readers approaching the text with an expectation of traditional clock-based or metric-based definitions of time may find certain conclusions counterintuitive. This is intentional. The aim of the work is to make explicit assumptions about time that are usually left implicit, and to treat time itself as a physically constructed object.
Introduction
Time occupies a central position in physical theory, yet its dynamical status remains conceptually unresolved. In standard formulations time appears as an external parameter with respect to which physical states evolve. It is introduced either as a coordinate or as the metric length of a timelike curve, but not as a dynamical structure generated by physical processes. Existing theories therefore describe dynamics in time but do not specify how time itself is formed, ordered, or stabilized as a global entity.
This work develops a physical theory in which time is not assumed as a background parameter but reconstructed from the canonical ordering of events. Temporal evolution is defined not as motion with respect to a pre-existing time coordinate but as the irreversible growth of a canonical event order. In this sense dynamics of ordering precedes and generates time rather than being governed by it.
All temporally meaningful information in physics arises through observation: through the reception of signals, the registration of events, and the construction of histories. No observer has access to the intrinsic temporal order of distant source events. What is physically available is only the order in which signals are received and recorded. The present theory therefore takes reception events as the fundamental observable elements from which temporal structure is constructed.
Reception events form a set \(E_r\) on which a canonical order relation is defined. This ordered structure generates a canonical history \(H=\langle e_1,e_2,\dots\rangle\), indexed by a history parameter \(k\) that represents the irreversible growth of reconstructed temporal order. Operational time arises as a derived parameter obtained by accumulating temporal increments along this history.
A central consequence of this construction is the dynamical immutability of temporal history. Once a segment of canonical order has been established it cannot be retroactively modified. Observational expansion may extend reconstructed history but cannot revise it. Temporal history therefore evolves by growth rather than revision.
Relativistic theories impose local causal constraints on admissible event orderings but do not provide a dynamical mechanism by which a unique global temporal order is constructed. Causal structure restricts possible sequences of events, yet it does not generate a canonical ordering nor enforce the immutability of reconstructed history. The framework presented here addresses this missing dynamical layer.
Within this theory global time emerges from distributed reconstruction of canonical order by reception nodes observing signals from multiple sources. Metric notions of time and clock models appear as secondary representations imposed on an already established temporal structure. In the limit of increasing observational coverage independently reconstructed times converge, yielding a universal temporal ordering structure generated by physical reconstruction rather than assumed as an absolute background.
Ontological Premise
This work adopts a minimal ontological premise: temporal structure is treated as an order relation, not as an intrinsic property of spacetime[1].
We assume that only locally registered events and their order of registration are operationally accessible. Any notion of intrinsic source time or absolute temporal coordinate is excluded from the set of admissible primitives.
Global time is therefore understood as a canonical order constructed from accessible event sequences, rather than as a pre-existing physical quantity. This premise is not introduced as a metaphysical claim, but as an operational constraint on physically realizable temporal coordination[2].
All subsequent physical constructions in this paper are based solely on this ordering premise.
Distributed Astrophysical Sources
The physical realization of canonical global time requires sources that provide long-term stable, repeatable signal structures observable across large spatial scales. Astrophysical objects emitting highly regular signals naturally satisfy these requirements.
Pulsars as Stable Periodic Sources
Millisecond pulsars are among the most stable known natural oscillators[3]. Their rotational periods exhibit long-term regularity comparable to, and in some regimes exceeding, that of terrestrial atomic clocks. This stability is maintained over astrophysical timescales and is observable from widely separated locations.
For the purposes of this work, pulsars are treated not as clocks defining intrinsic time, but as physical sources emitting repeatable signal patterns. Only the reception of these patterns and the order of their registration are considered operationally relevant[4].
Other sufficiently stable astrophysical or artificial sources may serve the same role.
Geometric Distribution of Sources
To construct a canonical order robust to local perturbations and directional bias, signals must be received from multiple sources distributed across the celestial sphere.
A distributed source set ensures that:
-
no single source dominates the construction,
-
local occlusion or noise affects only a subset of inputs,
-
geometric asymmetries do not translate into ordering artifacts.
The requirement is purely geometric: sources must span a sufficiently wide range of directions to provide angular separation. No assumption is made about mutual synchronization or intrinsic phase alignment between sources.
Stability and Redundancy
Long-term stability of the canonical global order is achieved through redundancy rather than reliance on a single source. Variations, glitches, or temporary loss of individual pulsars are treated as local disturbances that do not compromise the aggregated order.
By aggregating reception sequences from multiple sources, the system naturally suppresses outliers and preserves ordering continuity. The stability of the resulting canonical order is therefore an emergent property of the distributed source ensemble, not of any individual emitter.
This redundancy-based stability is a key physical advantage of astrophysical sources over single-device or locally synchronized clock systems.
Reception Nodes and Local Canonical Ordering
Definition 1 (Source Events and Reception Events). We distinguish two conceptually different classes of events.
Source events are physical processes occurring at emitting systems (for example emission of a signal by an astrophysical source). Such events may possess an intrinsic temporal order at the source.
Reception events are registrations of signals at reception nodes. A reception event corresponds to the physical detection of a signal emitted by some source.
Let \(E_r\) denote the set of all reception events available within a given observational domain.
In the present framework only reception events are operationally accessible. The intrinsic temporal order of source events, if it exists, cannot in general be reconstructed uniquely from observation due to propagation delay, reordering, and incomplete reception.
Temporal order used in this theory is therefore constructed solely from the set \(E_r\) of reception events.
Remark 1 (Observer-side accessibility of temporal order). Because signals propagate with finite and variable delays, the reception order of signals does not necessarily coincide with the intrinsic order of the corresponding source events.
For this reason the present theory treats the order of reception events as the only physically admissible primitive for the construction of temporal order and time.
Definition 2 (Canonical Temporal Structure). Let \(E_r\) denote the set of reception events within a given observational domain.
The canonical temporal structure of the system is the ordered pair
\[(E_r,\;\preceq),\]
where \(\preceq\) is the canonical order relation constructed from reception sequences as described in Section 4.
This ordered structure represents the reconstructed temporal history accessible to observers.
Definition 3 (Canonical History). Let \((E_r,\preceq)\) be the canonical temporal structure.
A canonical history \(H\) is a totally ordered subset (chain) of \(E_r\) representing the reconstructed sequence of reception events accessible to an observer.
Formally,
\[H = \langle e_1, e_2, e_3, \dots \rangle,\]
where \(e_i \in E_r\) and
\[e_1 \preceq e_2 \preceq e_3 \preceq \dots\]
The canonical index \(k\) enumerates elements of \(H\) and therefore parameterizes the growth of reconstructed temporal history.
Within the currently reconstructed event set, the canonical history corresponds to a maximal chain of the ordered structure \((E_r,\preceq)\).
Reception Nodes as Local Observers
Each reception node is a physical system equipped with detectors and signal processing capabilities sufficient to receive emissions from multiple distant sources. The node operates autonomously, without reliance on external synchronization.
At the node, incoming signals are registered as discrete reception events. Only the order of registration is assumed to be reliable; no assumption is made regarding absolute timestamps or simultaneity across nodes.
In this sense, a reception node functions as a local observer: it produces an ordered sequence of reception events based solely on locally accessible information.
Local Aggregation and Canonical Ordering
Each reception node continuously aggregates its incoming reception sequences from all accessible sources[5]. Aggregation is performed locally according to a fixed canonical protocol, identical across all nodes.
The aggregation protocol constructs a single local canonical order from the set of reception sequences. This order is not required to correspond to any intrinsic temporal structure of the sources. Its sole role is to impose a stable, reproducible ordering over locally registered events.
The resulting local canonical order is represented as an indexed sequence \[\langle 1, 2, 3, \dots \rangle,\] where indices encode ordinal position only. No physical meaning is attached to the numerical value of the index beyond order.
Encoding and Transmission of Order
Rather than transmitting raw signal data or locally measured timestamps, each reception node transmits its indexed canonical sequence.
Because indices encode order alone, transmission delays, variable propagation times, and others effects do not alter the causal structure of the sequence. Order is preserved under any transmission that maintains index order.
Upon receiving indexed sequences from multiple nodes, an observer can reconstruct the relative causal ordering of events across the network without requiring synchronized clocks or shared temporal coordinates.
This encoding of time as order provides a physically robust carrier of causality independent of spacetime metric assumptions.
Global Reconstruction and Radial Invariance
The distributed construction of canonical time culminates at the level of global reconstruction. An observer receives indexed canonical sequences from multiple reception nodes and combines them into a single global order. This section shows that such reconstruction is causally consistent and invariant under spatial expansion of the system.
Reconstruction from Indexed Sequences
Let \(\{H^{(j)}\}\) denote the set of indexed canonical sequences transmitted by reception nodes \(j=1,\dots,M\). Each sequence consists of an ordered list of indices encoding the local canonical order constructed at the corresponding node.
Global reconstruction proceeds by merging these sequences according to index order, using a fixed reconstruction protocol. Because indices encode order rather than timestamps, no synchronization between nodes is required.
The reconstructed global order \(H_*\) satisfies:
-
preservation of local order within each \(H^{(j)}\),
-
consistency across nodes for overlapping index ranges,
-
independence from transmission delays.
The resulting \(H_*\) is a canonical global order in the sense of Section 2, constructed entirely from physically transmitted information.
Formal Model of Reception and Reconstruction
We introduce a minimal formal model sufficient to state and prove the reconstruction properties used implicitly in Sections 4–5.
Definition 4 (Indexed canonical stream). Let \(K \subseteq \mathbb{N}\) be an index domain and let \(\Sigma\) denote an arbitrary payload alphabet (which may be empty). An indexed canonical stream is a sequence \[H = \langle (k, x_k) \rangle_{k \in K},\] where each \(k \in K\) appears at most once and \(x_k \in \Sigma\). The stream order is the natural order of indices: \((k, x_k) \prec_H (k', x_{k'}) \iff k < k'\).
Definition 5 (Transmission channel with delay, reordering, loss, and duplication). Let \(H = \langle (k, x_k) \rangle\) be an indexed canonical stream emitted by a reception node. A transmission channel produces at an observer an arrival stream \[A = \langle (k_i, x_{k_i}, t_i) \rangle_{i=1}^{\infty},\] where \(t_i\) is the arrival time of the element. The channel may:
-
introduce variable delays (arbitrary \(t_i\)),
-
reorder arrivals (no relation between \(i\) and \(k_i\)),
-
drop elements (some \(k \in K\) never appear in \(A\)),
-
duplicate elements (the same \(k\) may appear multiple times in \(A\)).
The channel is assumed to preserve index integrity: whenever an element with index \(k\) is received, its index value \(k\) is correct.
Definition 6 (Reconstruction operator). Given a finite prefix \(A_{\le T}\) of arrivals observed up to time \(T\), define the reconstruction operator \(\mathop{\mathrm{Rec}}\) as follows:
-
discard duplicate indices, keeping one representative per \(k\),
-
sort the remaining pairs \((k, x_k)\) by increasing \(k\).
Denote the reconstructed finite stream by \[H_T := \mathop{\mathrm{Rec}}(A_{\le T}).\]
Theorem 1 (Unique reconstruction under index integrity). Let \(H\) be an indexed canonical stream emitted by a reception node and let \(A\) be any arrival stream produced by a channel that preserves index integrity. Then for any time horizon \(T\), the reconstructed stream \(H_T = \mathop{\mathrm{Rec}}(A_{\le T})\) is uniquely determined by the received indices and is independent of arrival order and arrival times.
Moreover, if \(A\) contains all indices in a finite set \(K_T \subseteq K\) exactly once (i.e. no loss on \(K_T\)), then \(H_T\) equals the restriction of \(H\) to \(K_T\), ordered canonically by index.
Proof. By definition of index integrity, each received element carries its correct index value. Discarding duplicates yields a set of distinct indices and associated payloads present in \(A_{\le T}\). Sorting this set by increasing index produces a unique total order, since the usual order on \(\mathbb{N}\) is total. Therefore \(H_T\) is uniquely determined by the set of received indices and does not depend on arrival order or arrival times.
If, in addition, all indices in \(K_T\) are received exactly once, then the reconstructed set of pairs coincides with \(\{(k, x_k) : k \in K_T\}\) from the emitted stream \(H\). Sorting by index yields precisely the restriction of \(H\) to \(K_T\) in canonical order. ◻
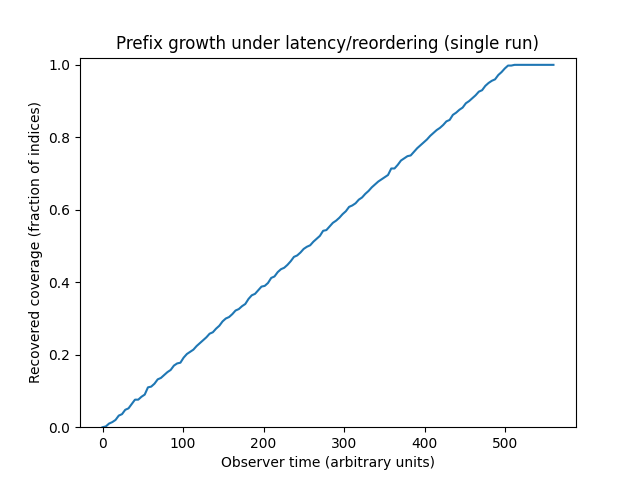
Corollary 1 (Monotone extension under partial reception). Let \(T_1 < T_2\) and let \(H_{T_1}, H_{T_2}\) be reconstructions from arrivals observed up to times \(T_1\) and \(T_2\). Then \(H_{T_1}\) is an order-preserving subsequence of \(H_{T_2}\). In particular, reconstruction extends monotonically as more indices arrive: previously established ordering relations are never invalidated.
Proof. The set of received indices up to time \(T_1\) is a subset of the set of received indices up to time \(T_2\). After duplicate removal, sorting both sets by increasing index preserves the relative order of the shared indices. Hence \(H_{T_1}\) appears as an order-preserving subsequence of \(H_{T_2}\). ◻
The monotone extension property is illustrated in Fig. 1.
Remark 2 (Reordering affects latency, not canonical order). The results above formalize that out-of-order arrival and variable transmission latency affect only when an observer can reconstruct a given prefix, not the reconstructed canonical order itself.
The following subsection formalizes this reconstruction process and establishes its correctness under arbitrary transmission delays, reordering, and partial loss.
Algorithmic Merge of Canonical Streams
We now specify a minimal merge procedure that combines reconstructed canonical streams from multiple reception nodes into a single global canonical order.
Definition 7 (Node-level canonical stream). Let \(H^{(j)} = \langle (k, x_k^{(j)}) \rangle\) denote the reconstructed canonical stream produced by reception node \(j\), as defined in Section 5.2. All streams share a common index domain \(K \subseteq \mathbb{N}\).
Definition 8 (Global merge operator). Let \(\{H^{(j)}\}_{j \in J}\) be a family of canonical streams. The merge operator \(\mathop{\mathrm{Merge}}\) produces a global canonical stream \[H_* = \mathop{\mathrm{Merge}}\bigl( \{ H^{(j)} \}_{j \in J} \bigr)\] by selecting, for each index \(k \in K\), at most one representative payload \(x_k\) from the available streams.
Merge procedure.
-
Initialize an empty map \(M : K \to \Sigma\).
-
For each received stream \(H^{(j)}\):
-
For each element \((k, x_k^{(j)}) \in H^{(j)}\):
-
If \(k \notin \mathrm{dom}(M)\), set \(M(k) := x_k^{(j)}\).
-
Otherwise, ignore the duplicate index.
-
-
-
Output \(H_* := \langle (k, M(k)) \rangle\) sorted by increasing \(k\).
Lemma 1 (Safety). The merge operator \(\mathop{\mathrm{Merge}}\) preserves the canonical order of each input stream \(H^{(j)}\).
Proof. Each input stream is ordered by increasing index. The merge operator never reorders elements by index, but only removes duplicates. Therefore, for any \(H^{(j)}\), the relative order of its elements is preserved in \(H_*\). ◻
Lemma 2 (Idempotence). Repeated application of \(\mathop{\mathrm{Merge}}\) to the same family of streams does not change the result.
Proof. Once an index \(k\) is inserted into \(M\), subsequent occurrences are ignored. Thus additional passes over the same data do not modify \(H_*\). ◻
Lemma 3 (Liveness). As additional elements with new indices arrive in any of the streams \(H^{(j)}\), the global canonical stream \(H_*\) extends monotonically.
Proof. Arrival of a previously unseen index \(k\) adds a new entry to \(M(k)\). Sorting by index appends this element at the appropriate position without altering existing order relations. ◻
Theorem 2 (Correctness of canonical merge). The merge operator \(\mathop{\mathrm{Merge}}\) produces a unique global canonical stream \(H_*\) that is independent of arrival order, transmission delays, and duplication across reception nodes.
Proof. Uniqueness follows from index integrity and deterministic selection per index. Safety, idempotence, and liveness follow from Lemmas 1–3. Therefore \(H_*\) is a well-defined canonical order consistent with all received streams. ◻
Causal Consistency
Causality in the proposed framework is carried by order alone. If an event \(e_a\) precedes \(e_b\) in the canonical sequence at a reception node, then this ordering is preserved in all reconstructions derived from that sequence[5], [6].
Because indexed sequences are transmitted causally, any observer reconstructing \(H_*\) obtains an order that respects all causal constraints encoded by the nodes. No observer can reconstruct an order that violates the causal relations established locally.
Thus causal consistency is guaranteed by construction and does not rely on global simultaneity or spacetime synchronization.
Radial Invariance
We now establish a central property of the construction: its invariance under spatial expansion.
Theorem 3 (Radial invariance of canonical global time). Let a canonical global order \(H_*\) be reconstructed from indexed canonical sequences transmitted by a set of reception nodes. Relocation of the observer or radial expansion of the reception network to arbitrarily larger spatial scales does not modify the reconstructed order \(H_*\), provided that index order is preserved in transmission.
Proof. The canonical global order \(H_*\) is defined solely in terms of ordinal relations encoded by indices. These relations are independent of spatial position, signal propagation time, and metric properties of spacetime.
Radial relocation of nodes or observers affects only the latency with which indexed sequences are received, not the ordinal structure of the sequences themselves.
Therefore, any observer, regardless of spatial location, reconstructs the same canonical global order \(H_*\), up to truncation determined by reception horizon. ◻
This invariance is non-trivial in contrast to synchronization-based schemes, whose validity degrades with spatial scale.
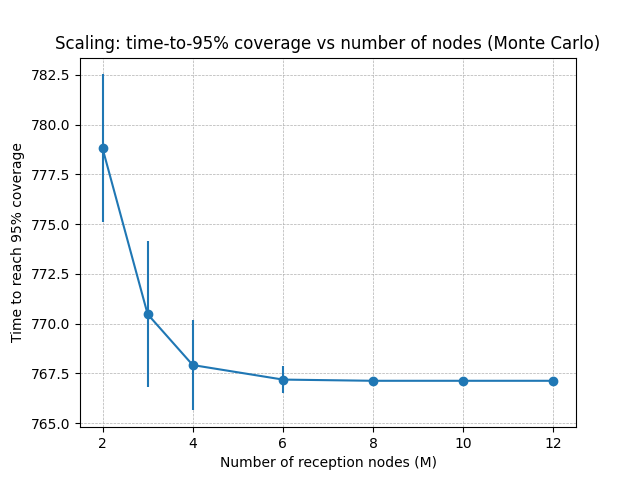
Figure 2 demonstrates the scalability of the construction with respect to infrastructure.
Implications for Cosmic Expansion
Radial invariance implies that the canonical global time constructed here scales naturally with cosmic expansion. As reception nodes and observers are deployed from planetary to interstellar or intergalactic distances, no modification of the temporal framework is required.
The only change induced by expansion is an increase in transmission delay and a corresponding shift in reception horizon. The structure of canonical time itself remains unaffected.
In this sense, canonical global time provides a physically realizable temporal substrate for coordination across arbitrarily large spatial scales.
Reordering and Late Arrivals
In any physical realization, indexed canonical sequences transmitted from reception nodes may arrive at an observer out of order. This may occur due to variable transmission latency, network congestion, or temporary signal loss.
The present framework explicitly admits such reordering. Because each transmitted element carries an ordinal index, the observer can reconstruct the intended order independently of arrival sequence.
Let \(\{(k, e_k)\}\) denote received indexed elements, where \(k\) is the canonical index and \(e_k\) the associated event marker. Reconstruction consists of ordering elements by increasing \(k\), not by order of arrival.
Out-of-order arrival therefore affects only the latency of reconstruction, not the reconstructed canonical order itself.
Partial Orders and Gaps
At any finite time, the observer may possess only a partial prefix of the canonical sequence, possibly with gaps due to missing indices. Such partial information induces a partial order consistent with the full canonical order.
As additional indexed elements arrive, the partial order monotonically extends toward the full reconstructed order. No previously established ordering relations are invalidated.
Causal Safety
Crucially, no reordering procedure can introduce causal inconsistencies. Indices encode causal order as established by reception nodes. Reconstruction by index comparison preserves all causal relations independently of transmission dynamics.
Thus, reordering is a purely syntactic operation on transmitted indices, not a physical reinterpretation of events.
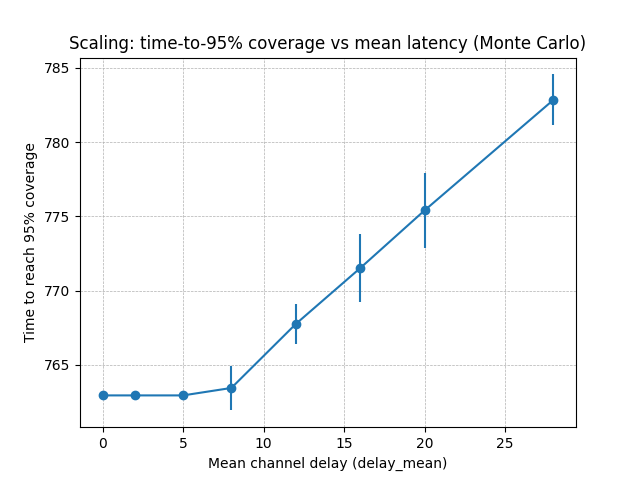
As illustrated in Fig. 3, spatial separation affects latency but not canonical order.
History immutability under reconstruction
In realistic observational settings, the set of available sources and reception nodes is not fixed. Sources may become available or unavailable over time, new reception nodes may be deployed, and observational coverage may expand dynamically. The reconstruction framework must therefore accommodate changes in the source set without compromising the physical meaning of already reconstructed temporal history.
The key requirement is that such dynamical extension may affect only the reconstruction of future events. Previously established order and time assignments must remain invariant. This requirement is formalized below.
Axiom 1 (History immutability under reconstruction). Once a canonical global order has been reconstructed from a given set of sources and reception data, the resulting history is not subject to retroactive revision. In particular, the addition of new sources, additional reception nodes, or further observational data may refine future segments of the reconstructed order, but cannot modify the established order or temporal values assigned to past events.
Sketch. Canonical reconstruction assigns order incrementally based on admissible reception sequences and prefix-monotone aggregation rules. Radial extension of the observation network introduces additional constraints only for events not yet reconstructed. Since neither order assignment nor time accumulation depends on future data, previously reconstructed segments remain invariant under such extensions. ◻
Remark 3 (Non-reconstructibility of past history). This immutability is a necessary condition for treating reconstructed time as a physical quantity. If past temporal order or values could be revised retroactively, time would lose its causal and coordinative meaning. Global time, in this framework, is therefore inherently non-reconstructible backward in history.
Operational Reconstruction of the Time Parameter
All time parameters introduced in this section are destination-side quantities: they are defined at the observer (destination) from received indices and do not represent the intrinsic time of any source.
Global Operational Time
Standard physical theories employ a time parameter \(t\) without an operational definition. In contrast, the present framework introduces a physically constructed global time parameter defined entirely through observable procedures.
Let \(\{\mathrm{index}_k^{(n)}\}\) denote reception indices obtained from a fixed set of distributed sources \(n = 1, \dots, N\) at a given destination. We define the global operational time increment between successive canonical events as \[\Delta t_{\mathrm{global}}(k) \;:=\; \sum_{n=1}^{N} w_n \bigl( \mathrm{index}_{k+1}^{(n)} - \mathrm{index}_{k}^{(n)} \bigr),\] where \(w_n\) are fixed aggregation weights. The global time parameter \(t_{\mathrm{global}}\) is obtained by accumulation of these increments.
This definition replaces the abstract time parameter \(t\) with an operationally defined physical quantity. Its physical content resides in the canonical ordering reconstructed from distributed reception, while its numerical form provides a usable parametrization for physical processes.
Remark 4. The weighted index difference does not define order; it parametrizes an order already established by canonical reconstruction.
Remark 5 (Observer-side time). The parameter \(t_{\mathrm{global}}\) is the time of the destination/observer: it is constructed from reception sequences and exists only relative to the observer’s act of registration. No claim is made that \(t_{\mathrm{global}}\) recovers any intrinsic source-time or source-side ordering.
We obtain the global operational time parameter by accumulation of increments. Fix an arbitrary origin \(t_{\mathrm{global}}(k_0)=0\) for some reference canonical event \(k_0\). Then for \(k \ge k_0\) define \[t_{\mathrm{global}}(k) \;:=\; \sum_{j=k_0}^{k-1} \Delta t_{\mathrm{global}}(j),\] and for \(k < k_0\) define \[t_{\mathrm{global}}(k) \;:=\; -\sum_{j=k}^{k_0-1} \Delta t_{\mathrm{global}}(j).\]
Differential form of temporal dynamics.
The operational time parameter may also be expressed in differential form with respect to the canonical order index. Let \(k\) denote the index of the canonical global order. Since time is constructed by accumulation of increments \(\Delta t_{\mathrm{global}}(k)\), the evolution of time along the canonical order can be written as
\[\frac{d t_{\mathrm{global}}}{d k} = \Delta t_{\mathrm{global}}(k).\]
This relation expresses the dynamical character of time in the present framework: temporal evolution is governed by the growth of canonical order rather than by motion with respect to a pre-existing time parameter.
The index \(k\) therefore plays the role of a history parameter describing the irreversible extension of reconstructed temporal order, while \(t_{\mathrm{global}}\) provides an operational parametrization of this order.
Integral representation of operational time.
Since the operational time parameter evolves according to \[\frac{d t_{\mathrm{global}}}{d k} = \Delta t_{\mathrm{global}}(k),\] its value along the reconstructed canonical history can be written in integral form as
\[t_{\mathrm{global}}(k) = \int_{k_0}^{k} \Delta t_{\mathrm{global}}(\kappa)\, d\kappa .\]
This expression makes explicit that operational time is obtained by integrating temporal increments along the canonical order of reconstructed events.
In this framework the canonical index \(k\) represents the growth parameter of temporal history, while \(t_{\mathrm{global}}\) provides an operational parametrization of that history.
History parameter.
The canonical index \(k\) plays the role of a growth parameter of reconstructed temporal history. Each increment \(k \to k+1\) corresponds to the irreversible extension of the canonical order by one newly registered event.
In this sense \(k\) functions as a history parameter governing the evolution of the reconstructed temporal structure. Operational time \(t_{\mathrm{global}}\) is not fundamental but arises as a parametrization obtained by integrating temporal increments along this history parameter.
Remark 6 (Gauge freedom). The choice of origin \(k_0\) and additive constant is conventional and carries no physical content. Only differences \(t_{\mathrm{global}}(k_2)-t_{\mathrm{global}}(k_1)\) are operationally meaningful.
Lemma 4 (Monotonicity and operational invariance of \(t_{\mathrm{global}}\)). Let \(t_{\mathrm{global}}(k)\) be defined by accumulation of increments \(\Delta t_{\mathrm{global}}(k)\) over the canonical order index \(k\). Then:
-
\(t_{\mathrm{global}}(k)\) is strictly monotonic with respect to the canonical order \(k\).
-
\(t_{\mathrm{global}}\) is invariant under arbitrary signal delays, reordering, and loss at the reception level, provided that canonical reconstruction is successful.
Sketch. By construction, the canonical order \(k\) is fixed prior to any numerical assignment. Each increment \(\Delta t_{\mathrm{global}}(k)\) is non-negative and depends only on index differences between successive canonical events. Therefore, accumulation preserves monotonicity.
Since index assignment and aggregation operate on reconstructed reception order, any variations due to propagation delay, temporary reordering, or partial loss do not affect the canonical index \(k\) itself. Consequently, \(t_{\mathrm{global}}\) remains invariant under such perturbations. ◻
Local Time as Partial Global Reconstruction
Physical systems often operate under limited access to global reception data. In such cases, timekeeping relies on a restricted subset of sources or on a single locally stable process.
Let \(S' \subset S\) denote a proper subset of global sources. A local operational time parameter \(t_{\mathrm{local}}\) is defined by the same construction as \(t_{\mathrm{global}}\), but with aggregation performed over \(S'\) only: \[\Delta t_{\mathrm{local}}(k) \;:=\; \sum_{n \in S'} w_n \bigl( \mathrm{index}_{k+1}^{(n)} - \mathrm{index}_{k}^{(n)} \bigr).\]
The parameter \(t_{\mathrm{local}}\) is likewise observer-side, constructed from a restricted subset of reception data. Local time thus represents a partial reconstruction of the global canonical order. Its accuracy and stability depend on the size, diversity, and regularity of the subset \(S'\), but its ordering remains consistent with the global time parameter whenever the reconstruction overlap is nonempty.
Remark 7. As in the global case, the weighted index difference does not define order but parametrizes an order fixed by canonical reconstruction.
Fix an arbitrary origin \(t_{\mathrm{local}}(k_0)=0\). Define \[t_{\mathrm{local}}(k) \;:=\; \sum_{j=k_0}^{k-1} \Delta t_{\mathrm{local}}(j),\] with the analogous extension for \(k<k_0\).
Remark 8. As for \(t_{\mathrm{global}}\), only differences of \(t_{\mathrm{local}}\) are operationally meaningful.
Remark 9. Atomic clocks and other local timekeeping devices correspond to extreme cases of partial reconstruction, where \(S'\) contains a single highly stable process. Such devices do not measure time itself, but provide a locally reliable approximation to the global operational time within a restricted domain.
Remark 10. In this work, \(t_{\mathrm{global}}\) is an operational time parameter expressed in units of reconstructed index increments. Conversion to SI seconds, if needed, is an external calibration step.
Noise, Limits, and Resolution
Any physical realization of canonical global time is subject to noise, instability, and finite resolution. This section outlines the fundamental limits of the proposed construction.
Source Noise and Variability
Astrophysical sources exhibit timing noise, glitches, and long-term variability. In the present framework, such effects are treated as perturbations to individual reception sequences.
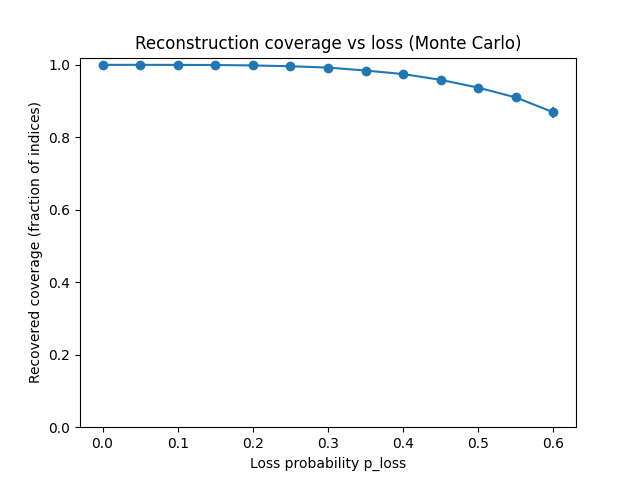
Because canonical ordering is constructed from multiple sources, noise affecting a subset of inputs does not compromise global order. Aggregation protocols suppress outliers and maintain continuity as long as a sufficient fraction of sources remains stable. As shown in Fig. 4, loss affects completeness but not order.
Reception and Transmission Noise
Reception nodes are subject to detector noise, signal loss, and transmission errors. These effects may result in missing or delayed indices.
Such disturbances do not alter the established canonical order. They affect only the observer’s reception horizon and the completeness of reconstructed sequences. Error detection and redundancy can be implemented at the level of index transmission without modifying the temporal framework.
Resolution and Upper Bounds
The resolution of canonical global time is limited by the stability of sources, the density of reception events, and the aggregation protocol. Increasing local clock precision cannot extend this bound.
Canonical time therefore admits a maximal meaningful resolution determined by physical constraints. Beyond this limit, additional temporal subdivision has no operational significance.
Failure Modes and Robustness
Loss of individual sources or reception nodes does not invalidate canonical time. The framework degrades gracefully: ordering remains well-defined over reduced source sets until a minimal non-degenerate configuration is lost.
This robustness distinguishes canonical global time from synchronization-based systems, which may fail catastrophically under partition or drift.
Time as an Integral over Canonical History
The axioms formulated in Section 9 establish that temporal structure is grounded in the canonical order of observer-registered events and that reconstructed history evolves only by irreversible extension. In particular, the canonical index \(k\) enumerates the growth of reconstructed temporal history.
Let \(\Delta t_{\mathrm{global}}(k)\) denote the operational temporal increment associated with successive elements of the canonical order, as defined in Section 7.1. The operational time parameter \(t_{\mathrm{global}}\) is obtained by accumulation of these increments.
In differential form the temporal evolution along the canonical order is given by
\[\frac{d t_{\mathrm{global}}}{d k} = \Delta t_{\mathrm{global}}(k).\]
Integrating along the reconstructed canonical history yields
\[t_{\mathrm{global}}(k) = \int_{k_0}^{k} \Delta t_{\mathrm{global}}(\kappa)\, d\kappa .\]
This representation makes explicit that operational time is not a primitive quantity but a functional constructed over the canonical history of observer-registered events.
The canonical index \(k\) therefore plays the role of a history parameter describing the irreversible growth of reconstructed temporal order. Time arises as a parametrization obtained by integrating temporal increments along this history.
In this sense, within the present framework, time can be understood as an integral over immutable temporal history.
Axiomatic Foundations of Time
The present theory of time is based on the following axioms, which specify the operational hierarchy of temporal structure.
Axiom 2 (Observer-side accessibility of events and order). Let \(E_r\) denote the set of reception events accessible within an observational domain.
Only reception events are operationally accessible. The intrinsic temporal order of source events, if it exists, is not directly observable and cannot be used in the construction of physical time.
All admissible notions of temporal order, history, and time are therefore defined exclusively on the set \(E_r\).
Remark 11. This axiom introduces a fundamental asymmetry between sources and observers: time is not transmitted from sources but is constructed by observers from the order of reception events.
Axiom 3 (Primacy of canonical temporal order). Physical time is founded on a canonical order relation \(\preceq\) defined on the set of reception events \(E_r\).
The ordered structure \((E_r,\preceq)\) constitutes the primary temporal structure from which reconstructed history and operational time are derived.
Axiom 4 (Immutability of reconstructed history). Let \(H\) be the canonical history obtained from \((E_r,\preceq)\).
Once a segment of \(H\) has been reconstructed, its order cannot be retroactively modified. Extensions of observational access may extend the history but cannot revise its already established part.
Axiom 5 (Secondary status of metric structure). Spacetime metric structure does not generate temporal order.
Metric structure may constrain admissible causal relations and provide geometric representations of temporal intervals, but the canonical temporal order \((E_r,\preceq)\) is established prior to any metric description.
Axiom 6 (Non-fundamental status of clock models). Clock models and the clock postulate do not constitute fundamental principles of time.
Clocks represent physical processes used to approximate the operational time parameter constructed from canonical temporal order and are valid only within restricted dynamical regimes.
Theorem 4 (Existence and monotonicity of operational time). Let \((E_r,\preceq)\) be the canonical temporal structure and let \(H=\langle e_1,e_2,\dots\rangle\) be a canonical history (a chain) in \((E_r,\preceq)\) indexed by \(k\in\mathbb{N}\).
Assume a non-negative increment functional \[\Delta t_{\mathrm{global}}: \mathbb{N}\to \mathbb{R}_{\ge 0}, \qquad k\mapsto \Delta t_{\mathrm{global}}(k),\] defined operationally from reception indices as in Section 7.1.
Define \(t_{\mathrm{global}}\) on \(H\) by fixing an origin \(k_0\) and setting \[t_{\mathrm{global}}(k_0)=0,\qquad t_{\mathrm{global}}(k)=\sum_{j=k_0}^{k-1}\Delta t_{\mathrm{global}}(j)\ \ \ (k\ge k_0), \qquad t_{\mathrm{global}}(k)=-\sum_{j=k}^{k_0-1}\Delta t_{\mathrm{global}}(j)\ \ \ (k<k_0).\]
Then \(t_{\mathrm{global}}\) is a well-defined operational time parameter on the reconstructed history \(H\) and is monotone with respect to the canonical order: if \(e_{k_1}\prec e_{k_2}\) in \(H\), then \[t_{\mathrm{global}}(k_1) < t_{\mathrm{global}}(k_2),\] provided \(\Delta t_{\mathrm{global}}(j)>0\) on the interval \(j\in[\min(k_1,k_2),\max(k_1,k_2)-1]\).
Proof sketch. By construction, \(t_{\mathrm{global}}(k)\) is obtained by accumulating non-negative increments along the index of the canonical history. Therefore, for \(k_2>k_1\), \[t_{\mathrm{global}}(k_2)-t_{\mathrm{global}}(k_1) =\sum_{j=k_1}^{k_2-1}\Delta t_{\mathrm{global}}(j)\ge 0,\] with strict positivity under the stated condition. Hence \(t_{\mathrm{global}}\) is monotone with respect to the canonical order on \(H\). ◻
Corollary 2 (Time as an integral over canonical history). Let \(H=\langle e_1,e_2,\dots\rangle\) be a canonical history in the canonical temporal structure \((E_r,\preceq)\).
If temporal increments \(\Delta t_{\mathrm{global}}(k)\) are assigned to successive elements of \(H\), the operational time parameter \(t_{\mathrm{global}}\) can be written in differential form as
\[\frac{d t_{\mathrm{global}}}{d k} = \Delta t_{\mathrm{global}}(k).\]
Consequently,
\[t_{\mathrm{global}}(k) = \int_{k_0}^{k} \Delta t_{\mathrm{global}}(\kappa)\, d\kappa .\]
Operational time therefore arises as an integral over the canonical temporal history generated by reception events.
Proposition 1 (Order invariance of operational time). Let \(H\) be a canonical history in the ordered structure \((E_r,\preceq)\).
Any two reconstructions that preserve the canonical order on \(H\) generate operational time parameters that differ at most by an additive constant.
Therefore the operational time parameter is invariant under all transformations that preserve the canonical order of reception events.
Sketch. Operational time is constructed by accumulation of increments along the canonical history index \(k\).
Transformations that preserve the canonical order correspond to relabelings of the history that do not alter the ordering of events. Such transformations may shift the origin of the index but do not change the accumulated increments between events.
Therefore the resulting operational time parameters differ only by an additive constant. ◻
Discussion
The framework presented here is conceptually related to approaches in which spacetime structure is derived from an underlying causal order. However, in contrast to causal set theory, the present construction does not assume that the fundamental order of events exists independently of observation. Instead, canonical temporal order arises from the observer-side reconstruction of reception events.
In this sense the proposed framework may be viewed as an operational realization of temporal order. Rather than postulating a fundamental causal order of spacetime events, the theory shows how a canonical temporal order can be physically reconstructed from distributed reception of signals.
Causal set theory postulates causal order. This work shows how temporal order can be physically reconstructed.
The present theory does not postulate an absolute time given a priori. However, it admits a well-defined asymptotic notion of universal global time.
In the idealized limit where the set of sources approaches completeness and observational coverage becomes unbounded, the reconstructed canonical order converges toward a universal ordering structure. Global operational time constructed at any stage represents a finite, observer-side approximation to this asymptotic limit.
As observational reach expands, the theory predicts monotonic convergence toward this universal global time, without requiring its full realization or direct accessibility.
Importantly, the theory does not restrict the class of admissible sources to pulsars or to astrophysical scales. Any physical process capable of producing repeatable, distinguishable emission patterns may serve as a source of canonical order. Periodicity here is understood in the minimal operational sense of pattern repeatability, not as strict regularity or ideal clock behavior.
In this sense, admissible sources range broadly, from radioactive decay chains and laboratory-scale oscillatory systems to astrophysical objects such as pulsars, magnetars, or other large-scale emitters. Astrophysical sources are used throughout this work as a canonical example only because of their practical stability, spatial separation, and long-term robustness, not because of any special ontological status.
Remark 12. Absolute time does not appear in this theory as a given object. At the current level of knowledge, it can only be approached, if at all, as a limiting concept arising from increasingly complete reconstruction.
Operational Predictions and Empirical Consequences
The predictive content of the present theory is not expressed through equations of motion for physical states. Instead, it is history-dynamical: the theory constrains the admissible evolution of reconstructed time itself, forbidding entire classes of temporal behavior such as observer-dependent divergence, retroactive modification of history, or coordinate-induced disagreement within a shared reconstruction domain.
Prediction 1: History Immutability under Expanded Observation.
Once a segment of global time has been reconstructed, its ordering and assigned temporal values must remain invariant under the addition of new sources, new reception nodes, or expanded observational coverage. Any physical implementation that allows retroactive revision of past time assignments cannot represent physical time in the sense defined by this theory. This prediction is directly testable in distributed timing systems under progressive expansion of input channels.
Prediction 2: Convergence under Source Redundancy.
As the number and diversity of independent sources increases, the reconstructed global time must exhibit monotonic convergence toward a stable ordering structure. Noise, delay, and local disturbances may affect convergence rate, but cannot induce divergence or reordering of established history. Failure of convergence under redundancy would falsify the reconstruction framework.
Prediction 3: Non-equivalence of Clock Synchronization and Time Construction.
Systems based solely on clock synchronization without canonical order reconstruction will exhibit structural instabilities under loss, delay, or reordering of signals. In contrast, order-based reconstruction will remain stable as long as reception order is preserved. This predicts observable differences between synchronization-based and order-based timekeeping architectures.
Prediction 4: Observer-Side Nature of Time.
Time constructed within this framework will depend on observer-side reconstruction procedures, not on intrinsic properties of sources. Different observers, given different access to reception data, may construct different time parameters, while preserving mutual consistency on overlapping reconstructed segments. This predicts systematic, procedure-dependent differences between time realizations that cannot be reduced to relativistic frame transformations.
Prediction 5: Breakdown of Clock Postulate Universality.
Physical clocks will deviate from metric time in regimes where their internal dynamics cannot be approximated by idealized worldline length. Such deviations are not anomalies, but expected consequences of treating clock models as secondary constructions. Precision clock networks operating under nontrivial conditions provide a direct empirical arena for testing this prediction.
These predictions do not rely on speculative dynamics or new forces. They follow necessarily from the axioms of canonical order, history immutability, and observer-side reconstruction. Their validation or refutation is therefore achievable within existing experimental and engineering infrastructures.
Prediction 6: Impossibility of Global Rollback under Expanded Access.
No expansion of observational access, including the addition of new sources, new reception nodes, or higher-resolution reception data, can justify a retroactive revision of an already reconstructed segment of global time. In particular, even if newly acquired data would allow a metrically more consistent or statistically more refined reconstruction, previously assigned temporal order and time values must remain invariant.
Any system in which expanded access permits a rollback, reordering, or numerical reassignment of past temporal relations fails to implement physical time as defined in this theory. Such behavior indicates a representational model rather than a physical realization of time.
Prediction 7: Observer-Invariant Global Time within a Closed Reconstruction Domain.
Consider a bounded region enclosed by a fixed set of reception nodes providing complete angular and source coverage. For any two observers located within this region, and employing the same reconstruction protocol, the reconstructed global time parameter will coincide on all overlapping reconstructed segments, independently of the observers’ spatial coordinates or worldlines within the domain.
Differences in position, motion, or local clock behavior may affect local measurement processes, but cannot induce discrepancies in the reconstructed global time as long as observers operate within the same closed reconstruction domain.
This prediction establishes global time as an observer-independent physical quantity within a shared reconstruction domain, despite the absence of a preferred reference frame or synchronized clocks.
Remark 13 (Derivation from the primacy of canonical order). Prediction 7 is a direct consequence of Axiom 3 (Primacy of Canonical Global Order). If global time is defined as a canonical order reconstructed from observer-side reception sequences, then two observers operating within the same closed reconstruction domain and applying the same protocol must obtain the same canonical order on their overlap. Spatial coordinates and local clock dynamics may affect the process of reception, but cannot change the reconstructed order itself, provided that the admissible reception data family is shared.
Prediction 8: Upper Bound on Temporal Resolution.
The resolution of operational time is limited by the density of distinguishable canonical events in the reconstruction domain. Increasing the precision of local clocks cannot extend this bound.
Consequently, beyond a certain scale additional subdivision of time does not correspond to any physically meaningful temporal structure.
Thought Experiment: Two Observers Inside a Reconstruction Shell
Consider a set of reception nodes distributed on a large sphere, forming a closed reconstruction domain \(\Omega\). Each node receives signals from a common family of periodic sources and produces indexed reception sequences, which are made available to any observer inside \(\Omega\).
Place two observers \(A\) and \(B\) at distinct spatial locations within \(\Omega\), possibly in relative motion. Assume both observers apply the same reconstruction protocol \(\mathop{\mathrm{Rec}}\) and aggregation rule \(\mathcal{C}\) to the same admissible reception data family.
Setup.
At observer-local times (according to their own clocks), \(A\) and \(B\) each compute a global operational time \(t_{\mathrm{global}}^{A}\) and \(t_{\mathrm{global}}^{B}\) by reconstructing the canonical order from the received indices and then applying the same parametrization rule.
Observation.
Due to different positions, channel conditions, and local dynamics, \(A\) and \(B\) may receive particular packets earlier or later, may temporarily miss receptions, or may experience different local clock drift. However, as long as both observers have access to the same set of reconstructed indices for a given event prefix, the canonical reconstruction on that prefix is identical.
Claim (Prediction 7).
For every reconstructed prefix on which the admissible data overlap, the observers obtain the same global time assignment: \[t_{\mathrm{global}}^{A}(k) = t_{\mathrm{global}}^{B}(k),\] independently of the spatial coordinates of \(A\) and \(B\) within \(\Omega\). Any discrepancy can arise only from (i) non-overlapping data access, (ii) different reconstruction protocols, or (iii) a violation of history immutability.
Physical meaning.
This thought experiment distinguishes coordinate-based time and clock synchronization from canonical operational time. In the present framework, global time is not a property of an observer’s trajectory, but a property of the shared reconstructed history within a closed reconstruction domain.
Remark 14 (Test criterion). If two observers inside the same reconstruction domain, using the same protocol and sharing the same reception data, obtain different global time assignments on an overlapping prefix, then the implementation does not realize time as canonical operational reconstruction.
Conclusion
This work has introduced a physical theory of global time in which temporal dynamics is grounded in the canonical ordering of events rather than in synchronized clocks, spacetime coordinates, or metric postulates. Time is not assumed as a background parameter; it is generated dynamically through the irreversible growth of an ordered temporal history.
Starting from minimal operational premises, the theory demonstrates that a global temporal order can be physically constructed through distributed reception of repeatable signals and observer-side reconstruction. Reception events are locally indexed, combined into canonical orders, and integrated into a globally consistent history. This process defines a genuine temporal dynamics: history evolves by extension of order, not by motion with respect to time.
In this framework, time is not transmitted by sources and is not read off from spacetime geometry. What is physically instantiated is an ordering relation generated at reception. Global temporal structure arises from the coordination of these local orderings and remains invariant under propagation delay, spatial separation, and relativistic frame choice. As the reception infrastructure expands, the canonical order grows, but its previously established structure remains fixed.
An operational time parameter is defined on top of the evolving order as a monotonic accumulation along the canonical history. Let \(k\) denote the canonical index enumerating the reconstructed temporal order. The evolution of operational time is governed by the relation
\[\begin{equation} \frac{d t_{\mathrm{global}}}{d k} = \Delta t_{\mathrm{global}}(k), \end{equation}\]
so that global time arises as an integral over canonical temporal history,
\[\begin{equation} t_{\mathrm{global}}(k) = \int_{k_0}^{k} \Delta t_{\mathrm{global}}(\kappa)\, d\kappa . \end{equation}\]
Operational time therefore does not precede temporal order. Instead, it provides a parametrization of an already established canonical history.
A central result of the theory is the dynamical immutability of temporal history. While observational access may expand, no extension of sources, resolution, or reconstruction capability permits retroactive modification of past temporal order or assigned time values. History evolves by growth, not by revision. This immutability constitutes a physical constraint on the admissible dynamics of time.
In this sense, temporal history behaves as an append-only structure: once ordering relations between events have been physically established, no subsequent expansion of observation can revise them. Time can therefore be understood as the irreversible growth of an append-only temporal history.
The predictive content of the theory lies in its constraints on temporal dynamics itself. It excludes observer-dependent divergence of global time within shared reconstruction domains, forbids global rollback or history revision under expanded access, and predicts convergence of independently reconstructed times as observational coverage increases. In the asymptotic limit, global time approaches a universal ordering structure as a result of physical reconstruction, not as a postulated absolute entity.
Canonical global time thus represents a maximal form of temporal coordination. It remains well-defined precisely in regimes where synchronization-based and metric notions of time lose operational meaning. By constraining the ways in which temporal order may evolve, the theory introduces genuine physical structure. It leaves local dynamical laws intact, while establishing a new level of physical lawfulness: the dynamics of time itself.
In summary, time is not a primitive parameter governing dynamics. Rather, time emerges from the canonical ordering of observer-registered events and is operationally realized as the irreversible growth of reconstructed temporal history.
Principle of Canonical Temporal Growth.
Physical time does not precede temporal order. Rather, time emerges as the irreversible growth of canonical history reconstructed from reception events.
Infrastructure for Distributed Reception
The physical construction of canonical global time developed in this work does not depend on a unique infrastructural realization. Nevertheless, it is useful to outline a minimal and physically plausible architecture capable of supporting distributed reception, local aggregation, and transmission of canonical order[4].
The purpose of this appendix is illustrative: it demonstrates that the proposed framework admits straightforward physical implementation using existing or near-term technologies.
Distributed Reception Nodes
A reception node is a physical system capable of receiving signals from multiple distant astrophysical sources, registering reception events, and constructing a local canonical order as described in Sections 3 and 4.
Each reception node is assumed to:
-
receive signals from a set of astrophysical sources distributed across the celestial sphere,
-
locally register reception events and aggregate them into a canonical order,
-
encode the resulting order as an indexed sequence,
-
transmit the indexed sequence to other nodes or observers.
The basic causal chain therefore takes the form: \[\text{Sources} \;\longrightarrow\; \text{Reception Node} \;\longrightarrow\; \text{Observer}.\]
No reception node is assumed to be privileged. Any node may act as an observer, and observers may themselves be mobile.
Geometric Deployment
To ensure robustness against local perturbations and directional bias, reception nodes must be geometrically distributed over scales exceeding those of the locality they are intended to coordinate.
For a planetary locality, this requires deployment beyond the immediate planetary environment. As a practical lower bound, reception nodes may be placed on heliocentric orbits or at Sun–planet Lagrange regions. Such configurations provide:
-
long-term orbital stability,
-
natural geometric separation,
-
continuous sky coverage for astrophysical source reception.
These choices are illustrative rather than prescriptive. Any deployment achieving sufficient spatial separation is admissible within the framework.
Local Processing and Transmission
Reception nodes do not perform global synchronization and do not exchange timestamps. All aggregation is performed locally at each node, using only locally registered reception order.
Transmission between nodes or to observers consists solely of indexed canonical sequences. Because indices encode order rather than time, transmission latency, variable propagation speed, and others effects do not alter the causal structure of the transmitted data.
Global reconstruction, when required, is performed by merging indexed sequences as described in Section 5.
Remark 15. The infrastructure described here provides access only to reception order and its canonical aggregation. It does not grant access to any intrinsic source order and introduces no assumptions about absolute or universal time. Accordingly, it remains fully compatible with the operational premises and physical constructions of this work.
Simulation Setup
This appendix summarizes the simulation model used to produce the numerical results presented in Figures 4–3. The purpose of the simulations is not to model any specific astrophysical system in detail, but to verify the structural properties of canonical reconstruction under realistic transmission effects.
Canonical Index Generation
Each reception node is assumed to emit an ideal canonical index stream \[k = 1,2,\dots,K_{\max},\] representing the locally aggregated canonical order constructed from astrophysical sources. Payload information associated with indices is ignored in the simulations, as reconstruction depends only on index integrity.
Channel Model
Transmission from reception nodes to the observer is modeled as an asynchronous channel with the following independent effects:
-
Loss: each index is independently dropped with probability \(p_{\text{loss}}\).
-
Duplication: each transmitted index is duplicated with probability \(p_{\text{dup}}\).
-
Delay: each transmitted index experiences a non-negative random delay drawn from a Gaussian distribution with mean \(\mu_{\text{delay}}\) and standard deviation \(\sigma_{\text{delay}}\).
-
Reordering: arrival order at the observer is determined solely by arrival times and is not correlated with index order.
The channel is assumed to preserve index integrity: whenever an index is received, its numerical value is correct.
Reconstruction and Merge
At the observer, reconstruction proceeds exactly as defined in Sections 5.2 and 5.3.
For each reception node, duplicate indices are discarded and remaining indices are sorted to obtain a reconstructed canonical stream. Streams from multiple nodes are merged by taking the union of indices and sorting by index value. No timestamps, clocks, or synchronization information are used at any stage.
Metrics
Simulation results are evaluated using the following metrics:
-
Coverage: the fraction of indices in \(\{1,\dots,K_{\max}\}\) recovered by reconstruction.
-
Prefix growth: the evolution of recovered coverage as a function of observer time.
-
Time-to-coverage: the earliest observer time at which a specified coverage threshold (e.g. 95%) is reached.
Monte Carlo averages and standard deviations are computed over multiple independent trials to estimate statistical variability.
Interpretation
The simulations are designed to test robustness and scalability of the canonical reconstruction procedure, not to optimize parameters. Observed trends are therefore qualitative: loss affects completeness but not order, reordering affects latency but not reconstruction, and increased infrastructure reduces time-to-coverage until a saturation regime is reached.
These numerical results support the analytical claims of Sections 5–7 and illustrate the physical feasibility of canonical global time reconstruction under realistic transmission conditions.